|
The Autonomous Mobile Robot GroupDepartment of Computer ScienceNorthwestern University |
||
|
|||
Projects
|
Robots
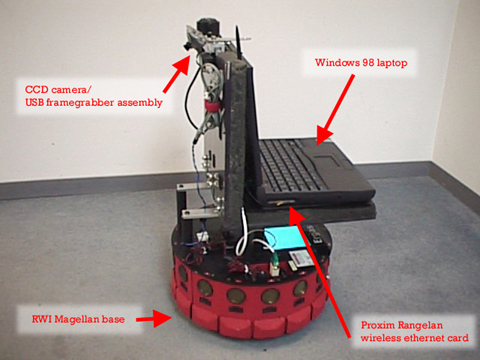
At present we have eight RWI Magellan bases. Of these, two are the latest in the Magellan line, while six are from an older generation of Magellans. The Magellan provides sonars, IR sensors and tactile bump switches, a total of 16 each, arrayed around the circular base. Additional sensing is provided by a ProVideo CCD camera, connected via Nogatech USB Video Capture Adapter Cables to laptops. The laptops run Windows98, and talk to the Magellan bases via serial port. Remote communication is provided by Proxim RangeLan wireless Ethernet cards. Six of the Magellans are named for various phobias :
The two newest bases have yet to be named.
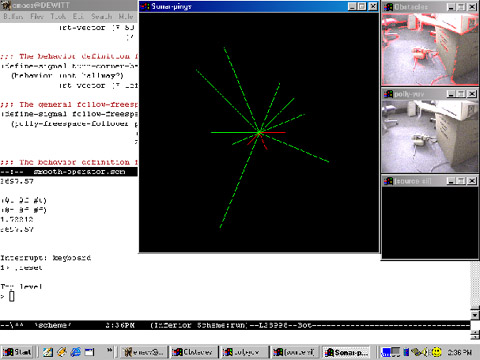
Above is a screenshot of our current development environment. Our applications are developed on Win98 boxes in Scheme running under Emacs. The Northwestern CS department has versions of Scheme48 ported to a number of Windows platforms. AMRG has its own version of Scheme48, with some extensions to the language unique to our needs. Most of our development is done in GRL, compiled into Scheme code. Occasionally we use native Scheme code, or if speed is important, C/C++ code linked to Scheme via foreign function calls. We have implemented many libraries of useful functions available, including popular behavior-based architectures such as motor-schemas and sumbsumption, a graphical package called iview, fuzzy logic and probabilistic routines, networking functions, etc. All these libraries are accessible from GRL.
|
||
|
|
AMRG home |
||